System Components
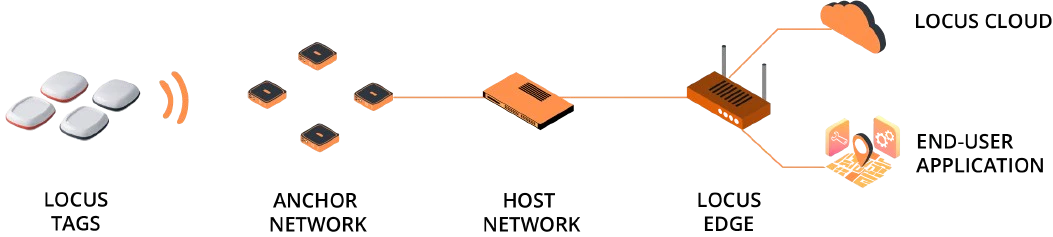
Before getting started, it is crucial to understand and review the main building blocks of Locus RTLS. The Enterprise positioning system- UWB Hardware (A network of Anchors and tags) : The Locus Hardware comprising of Locus Tags (mobile trackers) and Locus Anchors (stationary base stations) are the backbone for the real-time location system.
- Locus Location Engine (LLE) : The LLE is a physical edge device housing the core RTLS positioning server and connects to the Anchors through Ethernet (Cat 5.e). It is responsible for gathering all data received form anchors and transforms it into a cartesian coordinate (position). By Connecting to this Edge server, you can receive the real-time position data. There maybe multiple instances of LLEs in a single RTLS project .
- The Locus 3D Software : The Locus 3D Software is an enterprise application software and interface to install, configure and visualize the real-time position updates from Location engine. It can be complete run locally from the Location engine itself or it can be remotely accessed using Locus Partner Portal online.